W tej części skupimy się na beztuningowym strojeniu bez wykonanego Autostrojenia. Zabieg ten pozwala funkcji Load Observer’a na szerszy zakres finalnego oddziaływania na układ.
 1. Zaczynamy od wejścia w ustawienia osi (Motion Groups > MG > gAxis1)
1. Zaczynamy od wejścia w ustawienia osi (Motion Groups > MG > gAxis1)
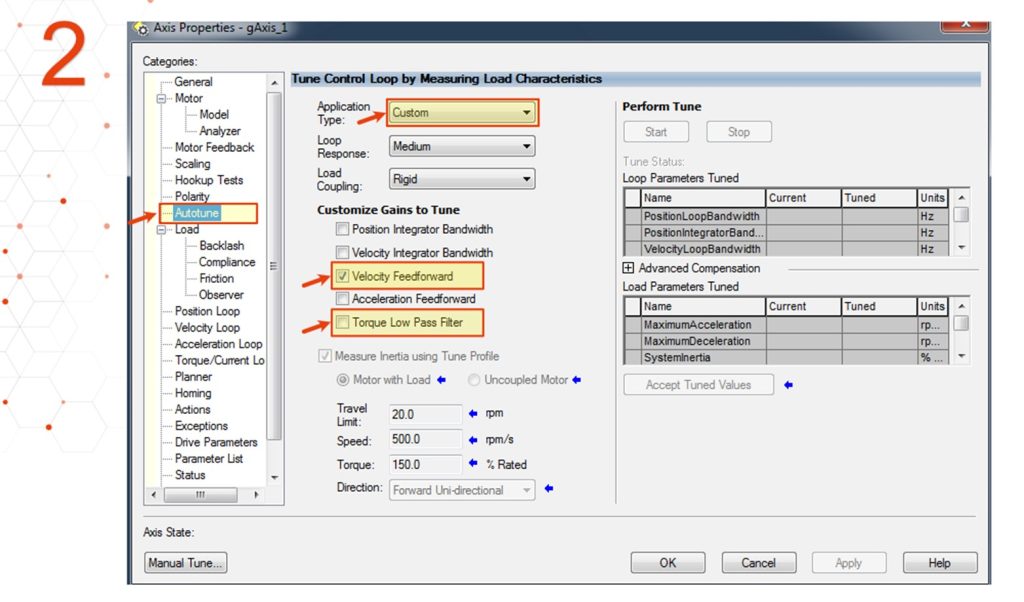
2. Następnie przechodzimy do sekcji Autotunei z Application Type wybieramy Custom.
Odznaczamy pozycję Torque Low Pass Filter a pozycję Velocity Feedforward zostawiamy zaznaczoną, tak jak na poniższym obrazie